動器")
簡單、自由地編寫檢查程序圖像傳感器

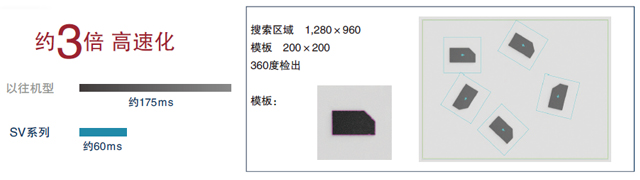
SV系列在小巧的機身中搭載高速CMOS傳感器、雙核CPU、Gigabit Ethernet,憑借出類拔萃的高速拍攝和獨創(chuàng)的算法,實現(xiàn)高速檢查。
此外,通過高速圖像壓縮與高速圖像輸出,有助于構(gòu)筑追溯性所需的“檢查圖像全部保存”的實現(xiàn)。
※:2020年5月本公司調(diào)查結(jié)果。
通過灰度邊緣的方向和面積值判斷載帶內(nèi)電子零件的方向
![[應(yīng)用示例]電子零件的方向檢查](https://device.panasonic.cn/ac/c/fasys/vision/vis_sensor/sv/images/pic03.jpg)
| ※:使用部分拍攝功能,12萬像素時的代表值。在所有的檢查中并不保證2ms。 |
[BEFORE] 以往方式(單任務(wù))以往方式的圖像處理機以單任務(wù)方式在執(zhí)行檢查后進行圖像的壓縮,因此圖像壓縮在減少通信時間方面的優(yōu)點沒有得到充分發(fā)揮。 [AFTER] SV系列(多任務(wù))憑借Dual Core CPU,能夠在檢查的同時以多任務(wù)方式進行JPEG文件圖像壓縮。可以大幅縮短到輸出為止的時間。有助于實現(xiàn)檢查圖像的全部保存。 |
![[新型CMOS/CPU]高速撮像 & 畫像輸出](https://device.panasonic.cn/ac/c/fasys/vision/vis_sensor/sv/images/pic04.jpg)
可以根據(jù)目的進行選擇的"簡單設(shè)定"根據(jù)用途,可以通過以下2種方式進行設(shè)定。
|


| 輪廓匹配 |
|---|
將需檢測圖像的輪廓信息登錄為模板,搜索并檢測與該模板相似的部分。
搭載可不受檢測對象的缺口等影響而檢測正確位置的算法,可以對檢出個數(shù)、相關(guān)值、檢出坐標、檢出角度、標尺等 進行OK/NG判斷。
| zhuanli申請中 |
|---|
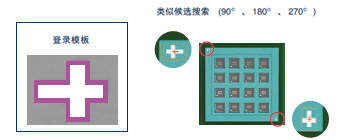
輪廓匹配 類似候選搜索功能
通過在輪廓檢出后追加搜索設(shè)定的角度方向(90°、180°、270°)可以在保持高速性的同時,實現(xiàn)穩(wěn)定的方向檢出。即使是方向難以明確的輪廓,也可減少在非預(yù)期方向 上的檢出。
根據(jù)傷痕的面積和灰度差,判定有無小傷痕、毛邊、缺口、異物等。 | 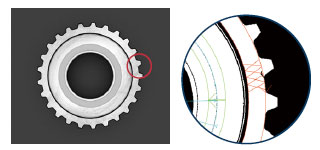 |
即使是照明不均勻或產(chǎn)生干擾的圖像,也可實現(xiàn)更穩(wěn)定的檢查。
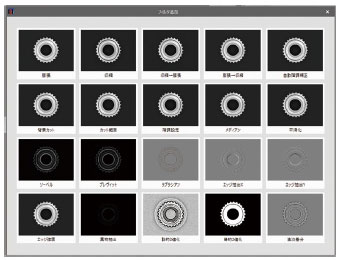
可以分別在畫面上與原始圖像進行比較,同時進行圖像加工的操作。
預(yù)處理濾波器圖像的統(tǒng)一顯示一覽顯示應(yīng)用預(yù)處理濾波器(20種)后的圖像。可以迅速地選擇對需要實施的檢查適合的預(yù)處理。 |

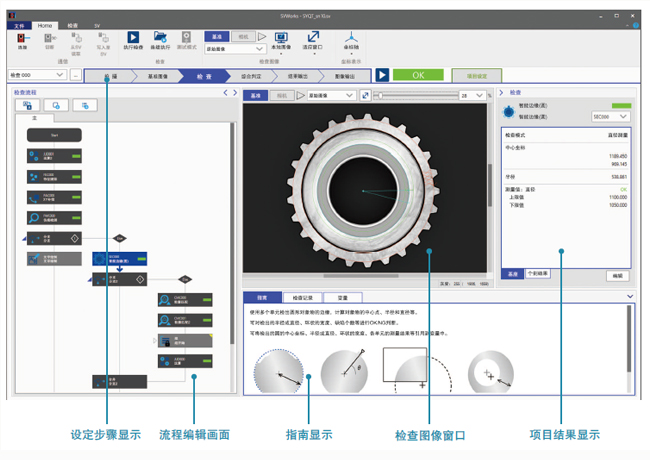
在盡力排除圖像處理相關(guān)專業(yè)術(shù)語的操作畫面中,在「指南顯示」中顯示設(shè)定內(nèi)容的說明。 采用高性能圖像處理機中搭載的流程圖方式程序,為需要實施的檢查的設(shè)定提供輔助。
只需按「設(shè)定步驟顯示」的順序一步步進行設(shè)定,即可輕松設(shè)定檢查項目乃至輸出設(shè)定。
>>SVWorks的詳情請閱覽「軟件」頁
搭載SV Web Console(Web服務(wù)器功能),可使用辦公室的PC等遠程監(jiān)控檢查畫面和檢查狀況。如果利用平板電腦,可以實時看著實物對照明和相機的安裝狀態(tài)等進行調(diào)整作業(yè)。并且,還可使用SVWorks通過網(wǎng)絡(luò)連接本體,對現(xiàn)場的SV進行操作。 |

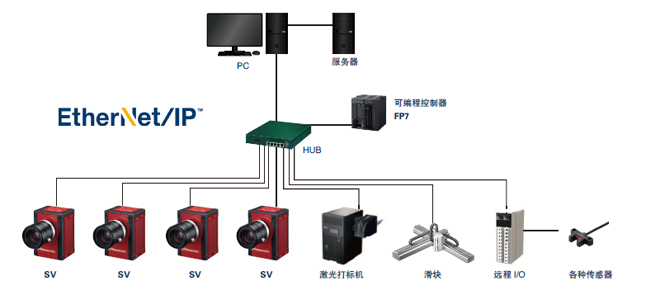
SV系列支持開放式網(wǎng)絡(luò)EtherNet/IP。
只需簡單的設(shè)定,即可從高位PLC通過高速通信進行控制。
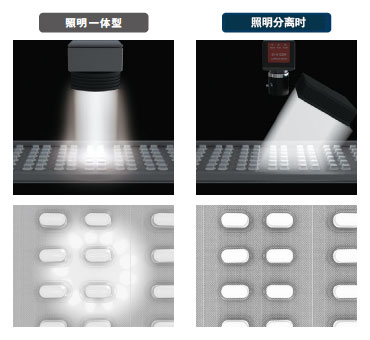
小巧機身中內(nèi)置照明電源(10W)。固定型(照明一體型相機)的照明在正反射時會拍攝到照明光源,有時會無法順利拍攝,或無法反映對比度。 |

")






")


